An example of the combined objective and constraint function of the Bump problem.
Example
The Bump problem may be extended into multiple dimensions. This example plots the objective function surface of the Bump problem in two dimensions.
>> input= createbumpstruct(2.8, 2);
>> input.MC_TYPE = 4;
>> input.NITERS = 500;
>> output = OptionsMatlab(input)
output =
VARS: [2x1 double]
OBJFUN: 0.2021
CONS: [2x1 double]
OBJTRC: [1x1 struct]
CONSTRC: [1x1 struct]
>> optimisationTerrain(output,input,3)
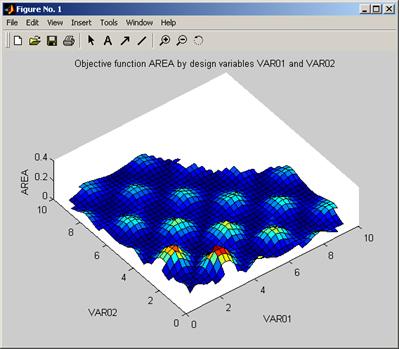
Figure 6 The valid objective function surface of the Bump problem in two dimensions
Functions
bumpfuncombined combined objective and constraint function
bumpfuncombined_parallel parallel version of the combined objective and constraint function
bumpfuncombined_parallel_parse parallel version of the combined objective and constraint function
createbumpstruct creates an input structure for the bump problem
createbumpstructparallel creates an input structure for the parallel invocation of the bump problem
Copyright © 2007, The Geodise Project, University of Southampton